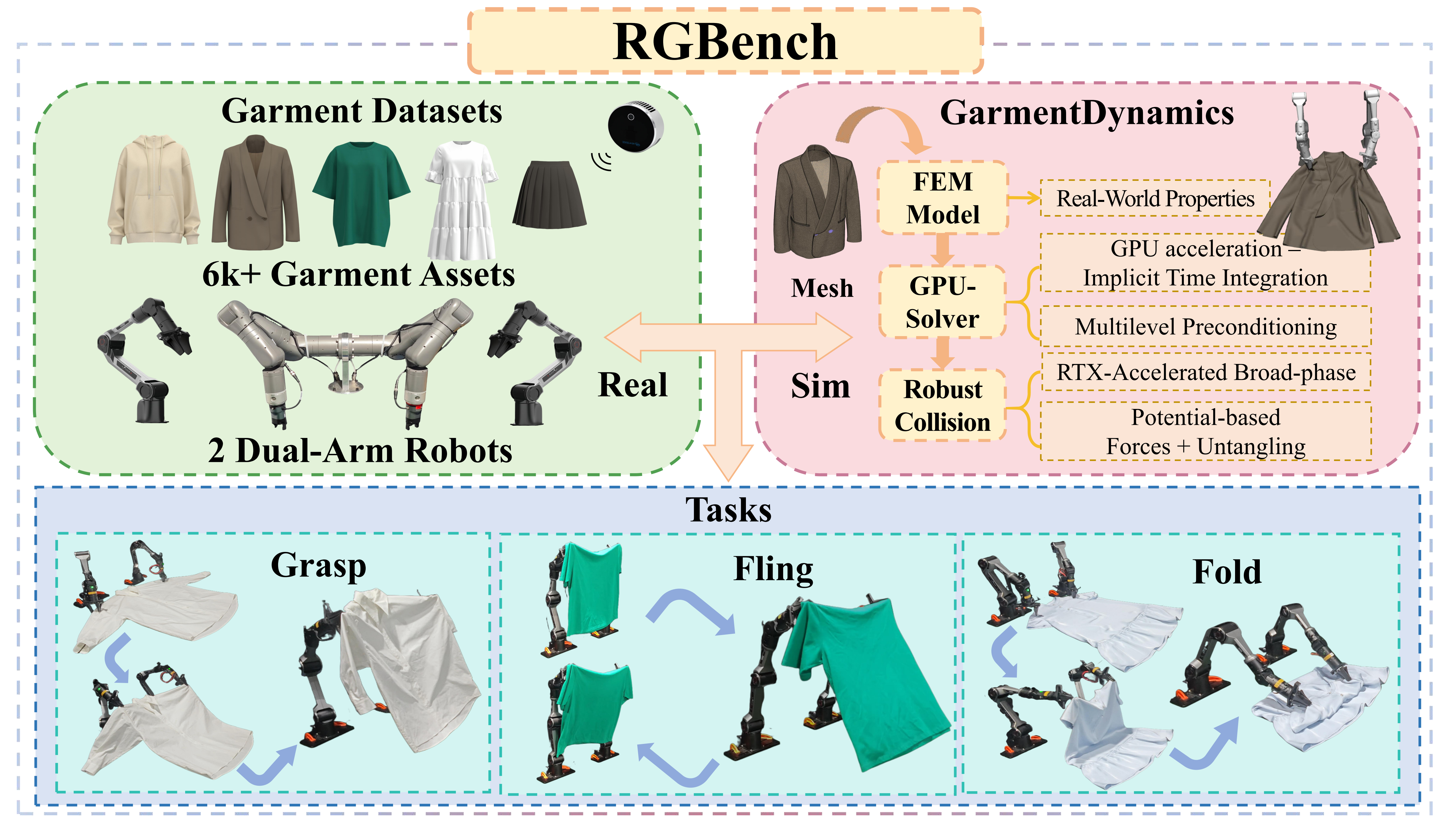
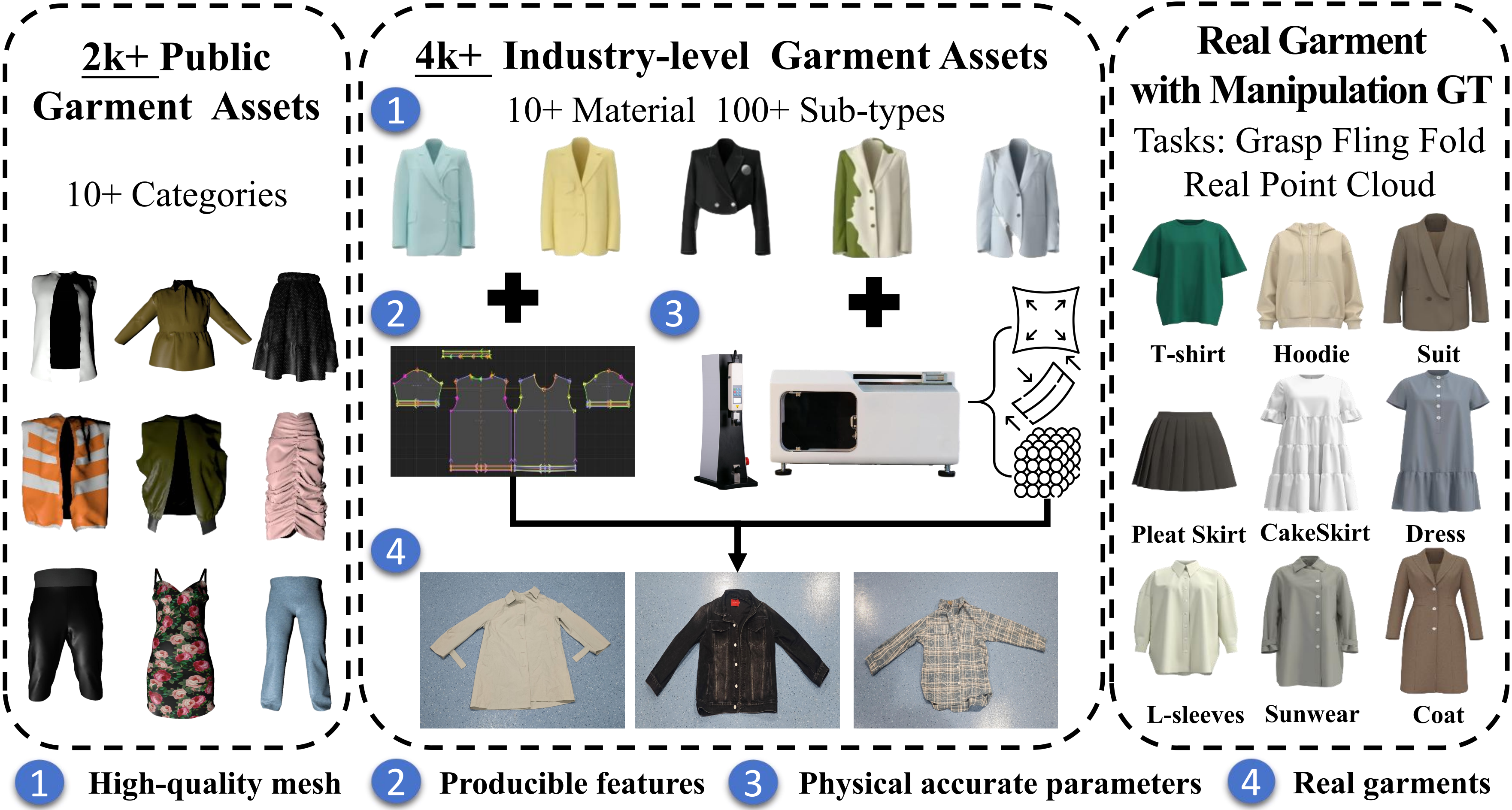
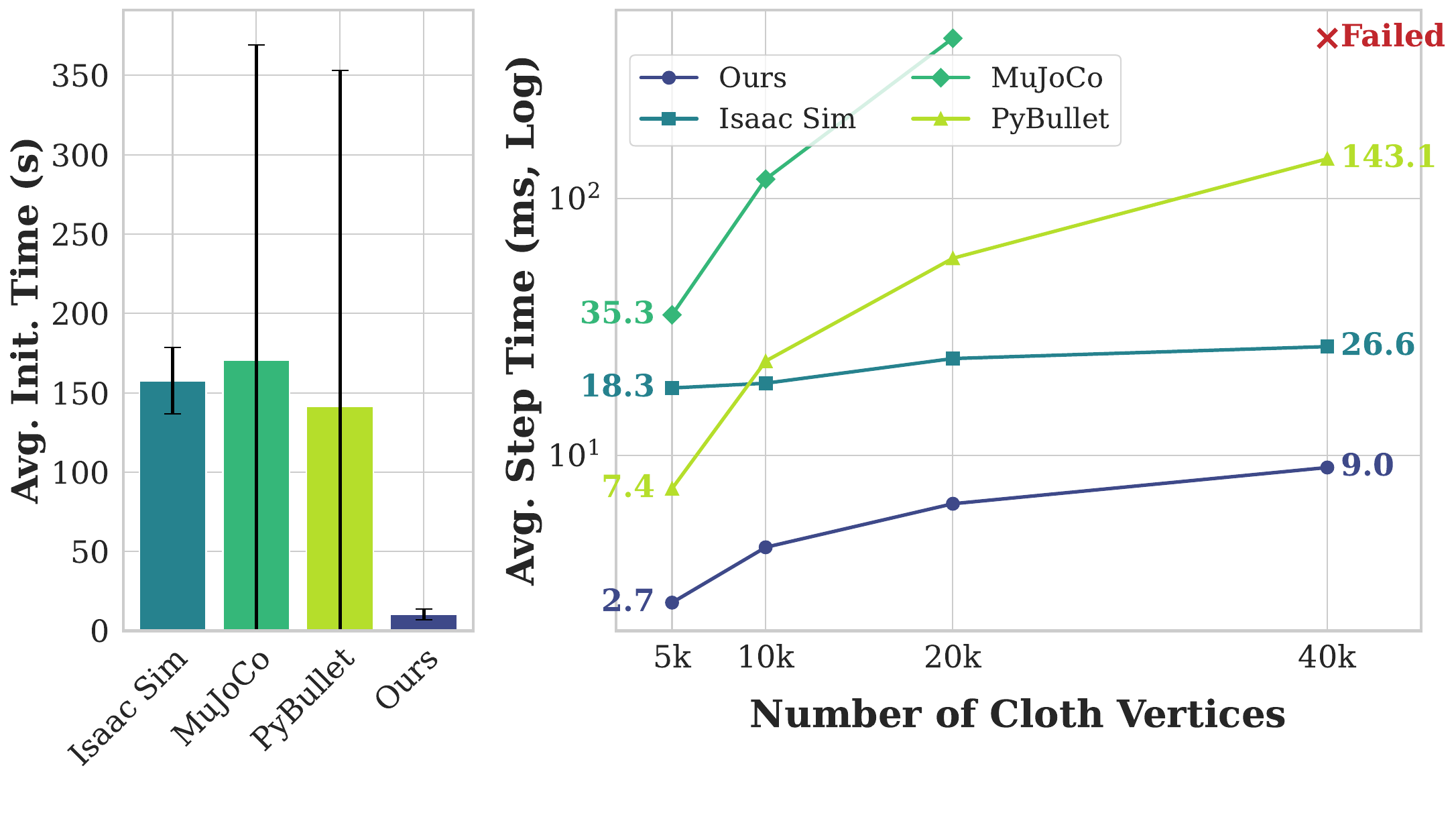
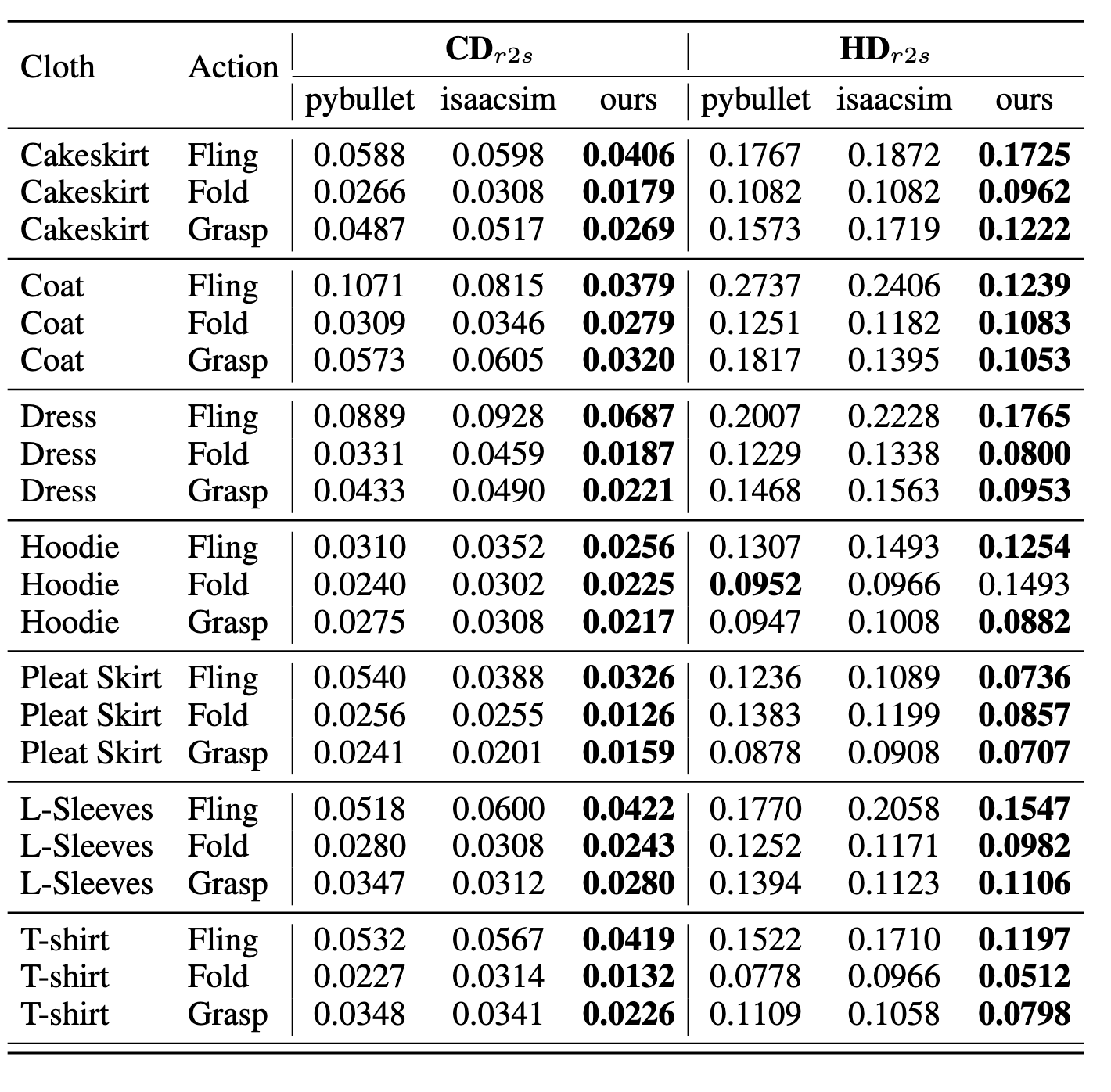
Real Garment Benchmark (RGBench): A Comprehensive Benchmark for Robotic Garment Manipulation featuring a High-Fidelity Scalable Simulator
1 Shanghai Jiao Tong University,
2
Shanghai Jiao Tong University,
2 Style3D,
3
Style3D,
3 Nanjing University
Nanjing University
AAAI 2026 Accepted
*Indicates Equal Contribution
†Corresponding Author
Shanghai Jiao Tong University,
2
Style3D,
3
Nanjing University
AAAI 2026 Accepted
*Indicates Equal Contribution
†Corresponding Author